Чотирнадцятирічний Єрмак Рогов із Шостки конструює роботів. У нього вже є робот-комунальник, а в розробці робот, який допоможе розміновувати території України після війни. Що можуть ці роботи, з чого вони зроблені та як працюють він розповів dev.ua.
Від маминої ініціативи до власного захоплення
Єрмак вчиться у Шосткинській школі-ліцеї № 2, займається на «Станції юних техніків», а ще він учасник Малої Академії Наук.

Коли хлопцю було приблизно 9 років, мама відвела його на гурток ракетомоделювання. Єрмак розповідає, що йому сподобалось, але захопило його все ж таки конструювання роботів, до гуртка якого він перейшов згодом.
Саме в процесі навчання на станції у нього з’явилася ідея зробити робота-комунальника, щоб полегшити людську працю.
«Я з дитинства усю техніку розбирав в домі, так, що навіть тато потім не міг її полагодити», — згадує хлопець.
Зібраний із LEGO
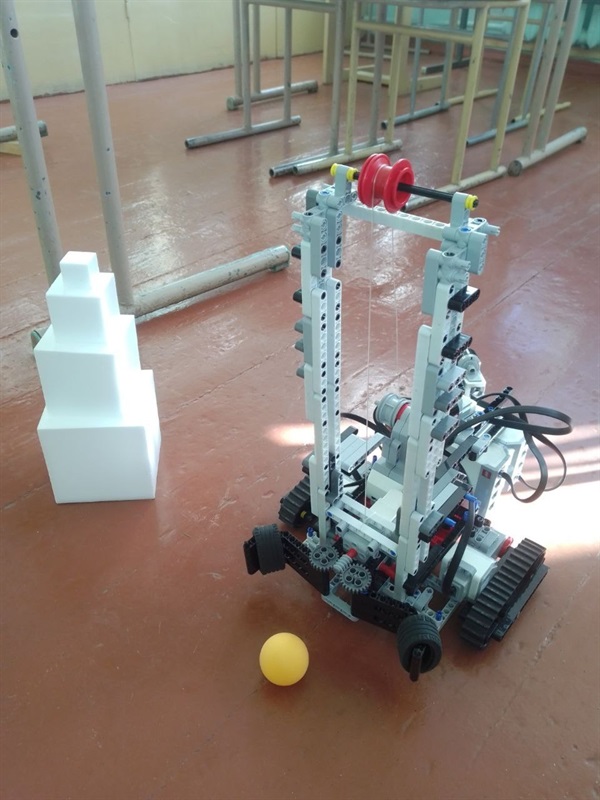
На Станції, де вчиться хлопець, знаходиться конструктор LEGO mindstorms ev3, за допомогою якого Єрмак і вчиться створювати роботів.

У конструкторі mindstorms є сервоприводи та датчики, з яких хлопець і зібрав свого робота, під'єднувавши деталі дротами. Рухається він за допомогою софта, запрограмованого на компʼютері.
Хлопець розповідає, що свого комунальника він зробив десь днів за вісім. Перші три дні конструював платформу, і за його словами це було досить легко. А наступні п’ять днів, вже важчі, як говорить Єрмак, він робив захват, який захоплює, підіймає та опускає все, що потрібно роботу.
Як працює робот з LEGO
За словами Єрмака, робот-комунальник складається з невеличкого комп’ютера, двох сервоприводів, які приводять в рух саму модель, та ще одного маленького сервоприводу, який піднімає та опускає робо-руку. В конструкції присутній ще один елемент, на кшталт кисті, який може затискати та відпускати щось. Робо-рука підіймається за допомогою лебідки, а весь механізм рухається за допомогою платформи, яка керується з комп’ютера.
Технічні характеристики:
- висота 35 см;
- довжина 25 см;
- ширина 20 см;
- швидкість до 2 км/год.
Багатофункціональний робот працює на батарейках, які можна змінити на акумуляторні й підзаряджати. Автономно на одному заряді він може працювати дві години.
«Наприклад, він може позбирати сміття, в урну, або посадити дерева чи помідори», — говорить він.
На конструювання робота-комунальника Єрмак витратив два набори LEGO mindstorms ev3, один з яких вартує близько 30 000 грн.
Робот-розміновувач
Єрмак працює над ще одним роботом, який допоможе у розмінуванні. Цей проєкт він готує для Малої академії наук разом зі своїм керівником Бєлицьким Євгенієм Васильовичем.
Це досить великий робот на базі гусеничного шасі з металошукачем. Він укомплектований камерою та може управлятися дистанційно на відстані до одного кілометра. Коли робот знаходить міну, металошукач починає здавати звуки, на пульті вмикається прапорець, і робот його сам ставить, маркуючи місце де знаходиться міна. Орієнтуючись на ці мітки, процес розмінування далі завершують сапери.
Робот ідентифікує міну за допомогою датчиків та софту, написаному Єрмаком на С++, та працює на базі плати мікроконтролерів з відкритим кодом Arduino Uno.
Технічні характеристики:
- довжина один метр;
- ширина 0,5 метра;
- висота до 30 см.
Він теж електричний і працює на акумуляторах. Оскільки це прототип, то Єрмак розповідає, що вони зробили всю конструкцію, в тому числі й гусениці, з відходів із рекламного пластика товщиною 5 мм. Крім того, використовували оргскло та пластмасове скло. Усі елементи склеювали між собою.
Робота-розмінувальника вже тестували на макетах мін, які від добре знаходив.
Плани
Єрмак хоче додати до робота-комунальника місткість для автоматичного поливу та зробити робо-руку функціональнішою, щоб вона мала можливість не тільки підійматися та опускатися, а й рухатись вперед та назад, а також збільшити швидкість.
«Ми працюємо над цим, і він буде готовий десь за місяць чи два», — говорить хлопець.
За словами Єрмака, він хоче продовжувати розробляти роботів і надалі.